10年專(zhuān)注搬運機器人智能AGV係統訂(dìng)製(zhì)生產廠家(jiā)
谘詢熱線:13336540655
實(shí)現人機共存的協作機器人(Cobot,Collaborative Robot)需要綜合考慮安全性、易用性、靈活性以及高(gāo)效的協作機製。這類(lèi)機器人設計的初衷(zhōng)是為了(le)與人類(lèi)工(gōng)作者在同一空間內(nèi)安全、高效地共(gòng)同工作,而不需(xū)要完全隔離。以下是具體的方法和技術,用於確保協作機器人的有效性和安(ān)全性:
閱讀詳情
隨著物流行業的發展和全球貿易的增長(zhǎng),集裝箱碼頭已經成為現代(dài)物流鏈的重要樞紐,必須提高其運行效率。然而,當前碼頭存在的瓶頸問題是如何優化集裝箱的運輸和堆場(chǎng)管理。
閱讀詳情
進行AGV(Automated Guided Vehicle,自動導引(yǐn)車)的狀態監(jiān)控(kòng)是確保其高效運行、及時維護以(yǐ)及(jí)優化(huà)調度的重要(yào)環節。一個全麵且實時的狀態監控係統可以幫助管理人員快(kuài)速識別潛在問題(tí),提高係統的可靠性和響應速度。以下是(shì)實現AGV狀態監控的關鍵步驟和技術:
閱讀詳情
實現AGV(Automated Guided Vehicle,自動導引車)的遠程控(kòng)製需要構建一個穩定、安全且高效的通信和控製係統。以下是具體步驟(zhòu)和技術要(yào)點:
閱讀詳情
優(yōu)化AGV(Automated Guided Vehicle,自(zì)動導引車)的路徑規劃是提升其效率、減少擁堵並確保物料安全運輸(shū)的關鍵。有效的路徑規劃可以顯著提(tí)高物流(liú)係統(tǒng)的整體性能。以下是幾種優化AGV路徑規劃的方法(fǎ)和技(jì)術(shù):
閱讀詳(xiáng)情
實現AGV(Automated Guided Vehicle,自動(dòng)導引車)的(de)遠(yuǎn)程控製是提升其靈活性和管理效率的重要手(shǒu)段。遠程控製(zhì)可以(yǐ)讓操作人員在遠離(lí)AGV的位置監控、指揮或幹預AGV的操作,尤其是在複雜環境或緊急情(qíng)況下尤(yóu)為重要。以下是實現AGV遠程控製的關鍵步驟和技術:
閱讀詳情
處理潛伏舉升AGV(Automated Guided Vehicle)車(chē)輛擁堵的問題(tí)是確(què)保物流係統高效運(yùn)作的關鍵(jiàn)。有效的交通管理可以減少等待時間、提高吞吐量並降低運營成本。以下是幾種(zhǒng)常見的策略和技術來解決和預防AGV擁堵:
閱讀詳情
升級潛伏舉(jǔ)升(shēng)AGV(Automated Guided Vehicle)的軟硬件設(shè)施是(shì)確保其性能(néng)持續優化、適應新技(jì)術和滿足不斷變化的業務需求的重要(yào)步驟。以下是詳(xiáng)細的升級(jí)方法和(hé)建議:
閱讀詳情
當潛伏舉升AGV(Automated Guided Vehicle)出現故障時,及時有效(xiào)的處理是確保物流係統持續高效(xiào)運行的關鍵。以下是(shì)針對潛伏舉升AGV可能出現的故(gù)障情況及其處理(lǐ)方(fāng)法:
閱讀詳情
潛伏舉升AGV與物流(liú)係統的集成是一個複雜但極具價值的過程,它涉及到硬件、軟(ruǎn)件以及操作流程的全麵協調。為了實現高效的集成(chéng),確保(bǎo)潛伏舉(jǔ)升AGV能夠無縫融入現有(yǒu)的物流環境並優化(huà)整體運作效率,以下是關鍵步(bù)驟和技術考慮:1. 需求分析明確目標:確定引入潛伏舉升AGV的具體目的,如提高搬運(yùn)速度、減少人工幹預或增強安全(quán)性等。評(píng)估(gū)現有係統:了解當(dāng)前物流係統的布局、設備和工作(zuò)流程,識別潛在的瓶頸(jǐng)點。2. 選擇合適的AGV型號負載能力:根據(jù)需要搬運的貨物重量選擇(zé)適當承載力的潛伏舉升AGV。導航(háng)方式:決定采用何種導航技術(例如激光導航、磁條引導、二維碼識別(bié)等),以(yǐ)適應場地條件。尺(chǐ)寸與(yǔ)機動性:考量
閱讀詳情
潛伏舉升AGV與物流(liú)係統的集(jí)成是一(yī)個複雜但極具價值的過程,它涉(shè)及到硬件、軟件以(yǐ)及操(cāo)作流程的(de)全麵協調。為了實現高效的集成,確保潛伏舉(jǔ)升AGV能(néng)夠無縫融入現有的(de)物流環境並優化整(zhěng)體運作效率,以下(xià)是(shì)關鍵(jiàn)步驟(zhòu)和技術考慮:
閱讀詳情
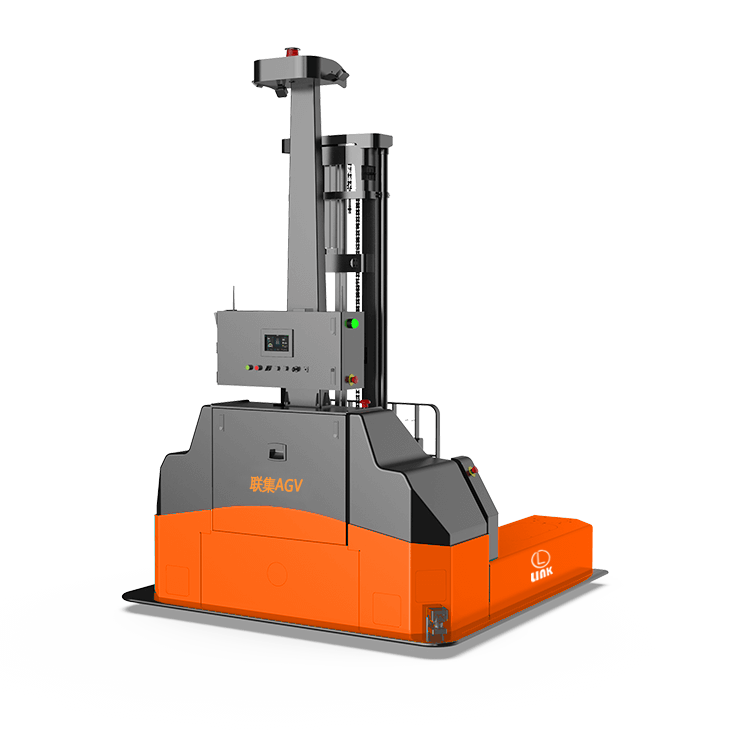
潛伏舉(jǔ)升AGV(Automated Guided Vehicle),也被稱為自動導引運輸車,是一種專門設計用於在倉庫、工廠等環境中自動搬運貨物的移動(dòng)機器人。它具有“潛伏”和“舉升(shēng)”兩種主要功能,可以深入(rù)到托盤或貨架底部進行(háng)物料的拾取(qǔ),並通過內(nèi)置(zhì)的舉升裝置將貨物提升到一定高(gāo)度以便運輸或放置。
閱讀詳情
複合機器人在高端製造(zào)領域的(de)應用非常廣泛,特別是在那些對精度、效(xiào)率(lǜ)和靈活性有嚴格要求的(de)行業中。
閱讀詳(xiáng)情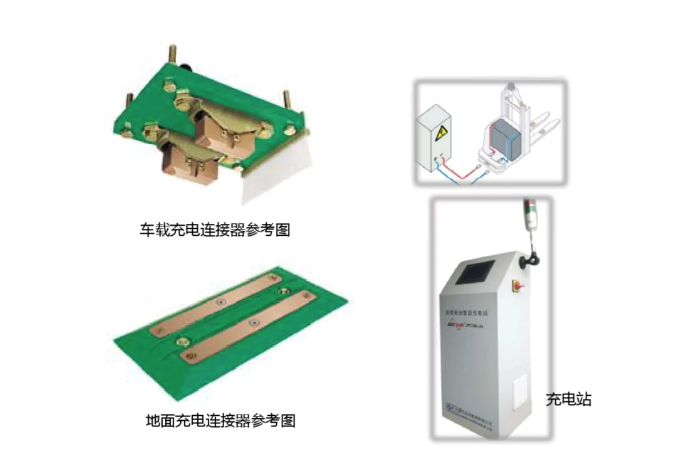
AGV導航方式發展(zhǎn)展望
閱讀詳情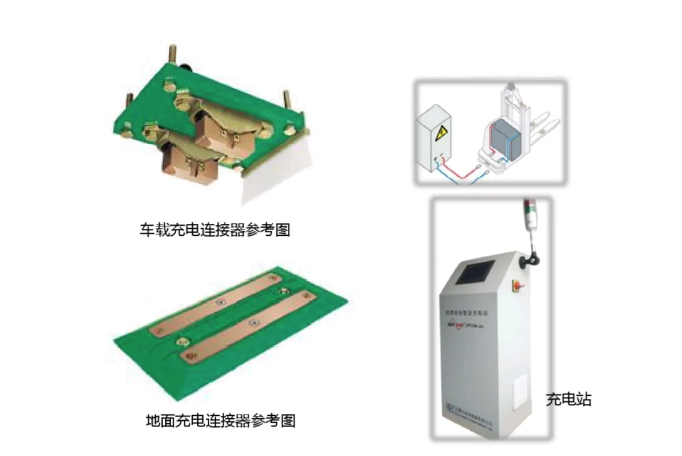
AGV充(chōng)電係統
閱讀詳情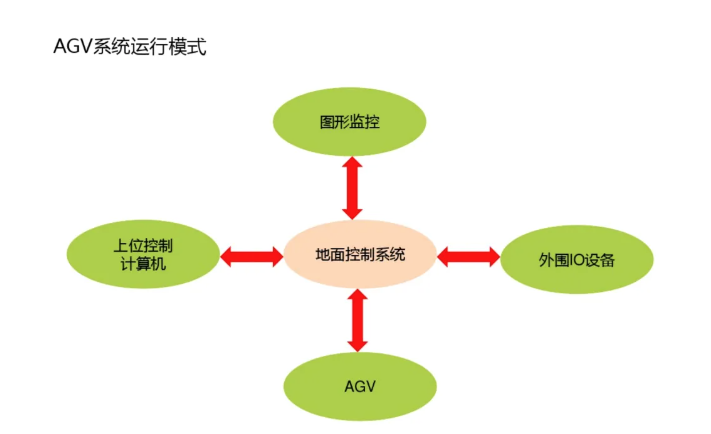
AGV係統運行模(mó)式
閱讀詳情
AGV的主要導引方式介紹
閱讀(dú)詳情
AGV(Automated Guided Vehicle)小車的導航方式多種(zhǒng)多樣,每種方式都(dōu)有其獨特的優點(diǎn)和(hé)適用場景,因此無法一概而(ér)論哪種導航方式最好。以下是(shì)對幾種常見(jiàn)AGV小車導航方式的詳(xiáng)細分析:
閱(yuè)讀詳(xiáng)情(qíng)
物料(liào)搬運:AGV小車能夠在車間工位之間自動搬運物料,如原材料、半成品、成品等。這減少了人工搬運的勞動力需求,提高了搬運效率。生產線對接:AGV小車能夠準確對接生產線上(shàng)的各個工位,實現自動化、無人化的物料供應和搬運。這提(tí)高了生(shēng)產線的(de)自動化程度和生產效率。倉儲管理:AGV小車能夠在倉庫中自動完成貨物的存取、分揀、堆垛等任務。這提高了倉庫的管理效率和準確性,降低了人(rén)力成本。質量檢測:在質量檢測工位,AGV小車能夠自動搬運待檢產品到檢測(cè)設備(bèi)上,並自(zì)動將檢測結果反饋到係統中。這提高了質量檢測的效率和準確性。
閱讀詳情AGV(Automated Guided Vehicle,AMR小車,自動導引車)小車搬運貨物的方式多種多樣(yàng),主要根據其設(shè)計、應(yīng)用場景和貨物特性來(lái)選擇。以(yǐ)下是聯集AGV生產的AGV小車形(xíng)式,也是市場上常見的,或者非標(biāo)訂製(zhì)的的AGV小車搬運貨物的方式:
閱讀詳情微信掃一掃加(jiā)關注