構建AGV(自動導引車)的感知與理解環境是一個複雜的過程,涉及多種技(jì)術的綜合應用。以下是基於我搜索到的資料,對如何構建(jiàn)AGV感知與理解環(huán)境的詳細說明:
傳感器技術的應用
AGV通過搭載多種傳感器來感知環境,包括激光雷達、攝(shè)像頭、超聲波傳(chuán)感器和慣性導航係統等。這些傳感器能夠實時監測周圍環境,獲取障礙物、牆(qiáng)壁、貨物等信息,從而幫助AGV確定自(zì)身位置(zhì)並規避障(zhàng)礙物。例如,激光(guāng)雷達通過發射激光束(shù)並(bìng)接收(shōu)反射光束,實現對周圍障礙物的高精度測距和三維建模;攝(shè)像頭則通過(guò)圖像處理算法(fǎ)判斷障礙物的位置和形狀(zhuàng)。 無人駕駛車輛是如何感知(zhī)和理解這個世界的?
無人駕駛車輛是如何感知(zhī)和理解這個世界的?多傳感器(qì)數據融合
由於單一傳(chuán)感(gǎn)器存在感知範圍有(yǒu)限(xiàn)或精(jīng)度不足的問題,AGV通常(cháng)采用多傳感器數據融合技術,將不同傳感器的數據進行處(chù)理和融合(hé),以提高感知精度和魯棒性。例如,通(tōng)過Kalman濾波或粒子濾波算法,可以將激光雷(léi)達、攝(shè)像頭和超聲波傳感器的數據整合為統一形式的感知結果。此外,SLAM(Simultaneous Localization and Mapping)技(jì)術也被廣泛應用於地圖(tú)構建和定位(wèi)中。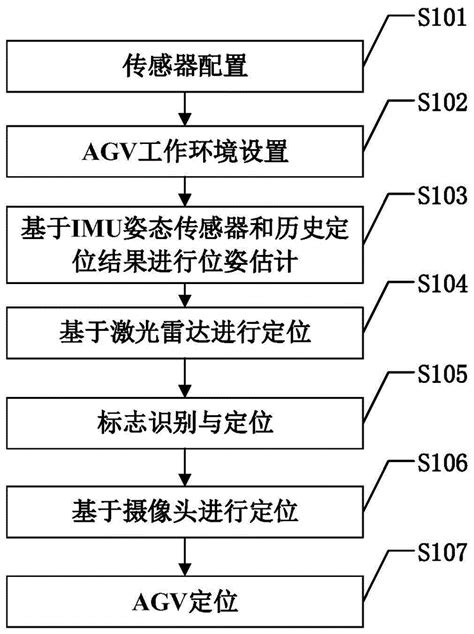
深度學習與神經網絡
深度學習技術在AGV的環境感知中起到了重要作用。通過訓練模型識別各種環(huán)境模式,AGV可以提高導航的準確率,並(bìng)預測環境中的動態變化。例如(rú),卷積神經網絡(CNN)被用於自由空間檢測,幫助AGV在複雜(zá)環境中安全導航(háng)。此外,深度強化學習(如(rú)DDPG算法)也被用於優化AGV的自主(zhǔ)導航和避障策略。協同感知與(yǔ)數據共享
在多AGV係統中,單個AGV的(de)感知能力可能受到(dào)限製,因此(cǐ)引入協同感知機製可以顯著提升整體感知(zhī)能力。通過AGV之間的信息交互(hù)和數據融合,可以(yǐ)擴展感知範圍並提高公共區域的感知精度。例如(rú),控製中心可以匯總(zǒng)各AGV的數據,生成更精確的全局環境地圖,並根據任務需求進行路徑規劃。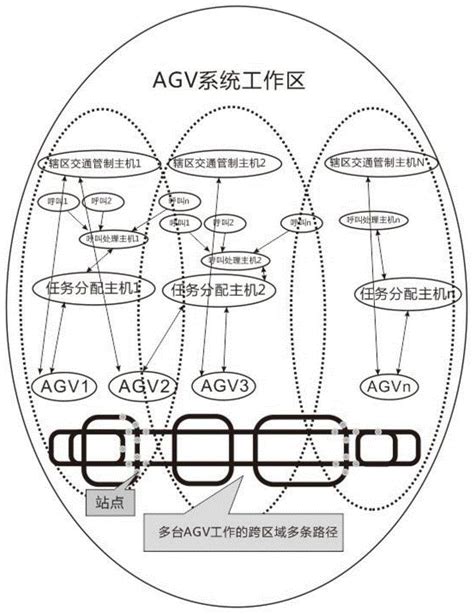
動態環境適(shì)應與路徑規劃
AGV需要能夠實時感知環境(jìng)變化(huà),並動態調整路徑以(yǐ)應對新的障(zhàng)礙物或任務需求。例如(rú),通過快速路徑重(chóng)規劃算法,AGV可以在發(fā)現新障(zhàng)礙物後迅速生(shēng)成(chéng)新的最優路徑。此外,基(jī)於(yú)深度學習(xí)的路徑(jìng)規劃算法(fǎ)能(néng)夠學習複雜環境中的運動規律,提高路徑規劃的智能化水平。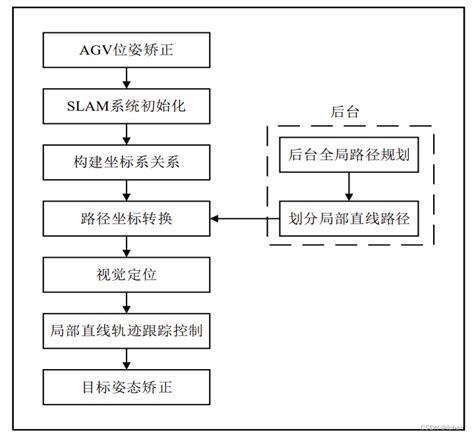 AGV 導航方法總體設計與分析_agv二維碼導航
AGV 導航方法總體設計與分析_agv二維碼導航人臉識別與特殊功能
在某些應用場景中,AGV還需要(yào)具備特殊功能,如人臉識別(bié)技術可以(yǐ)幫助AGV在人流密集的環境中識別特定人物,從而提高安全性。全局視覺與目標檢測
全(quán)局視覺技術通過分析圖像(xiàng)或視頻獲取整個(gè)場(chǎng)景的信(xìn)息(xī),是實現自動駕(jià)駛(shǐ)的關鍵技術之一。例如,目標(biāo)特征顏色條件分類算法能夠在不同光(guāng)照條件下提(tí)高AGV的識別(bié)魯(lǔ)棒性。 AGV小車典型設(shè)計算法及應用
AGV小車典型設(shè)計算法及應用
構建AGV的感知與理解環境需要綜合運用(yòng)多種傳感器技術、數據融合算法、深度學習模型以及協同感知機製。這些技(jì)術的結合不僅提升了AGV的自主性(xìng)和適應性,還為其在複雜環境中(zhōng)的高效運行提供了堅實的基(jī)礎。